** Progress in Earth and Planetary Science is the official journal of the Japan Geoscience Union, published in collaboration with its 51 society members.
** Progress in Earth and Planetary Science is partly financially supported by a Grant-in-Aid for Publication of Scientific Research Results to enhance dissemination of information of scientific research.





Gallery View of PEPS Articles
Research
Atmospheric and hydrospheric sciences
Vertical structure of the lower troposphere derived from MU radar, unmanned aerial vehicle, and balloon measurements during ShUREX 2015
Luce H, Kantha L, Hashiguchi H, Lawrence D, Mixa T, Yabuki M, Tsuda T
MU radar, Unmanned aerial vehicle (UAV), lower troposphere and boundary layer, refractive index gradient, Kelvin-Helmholtz instability, temperature and moisture fine structures, sheets and layers, gradient Richardson number
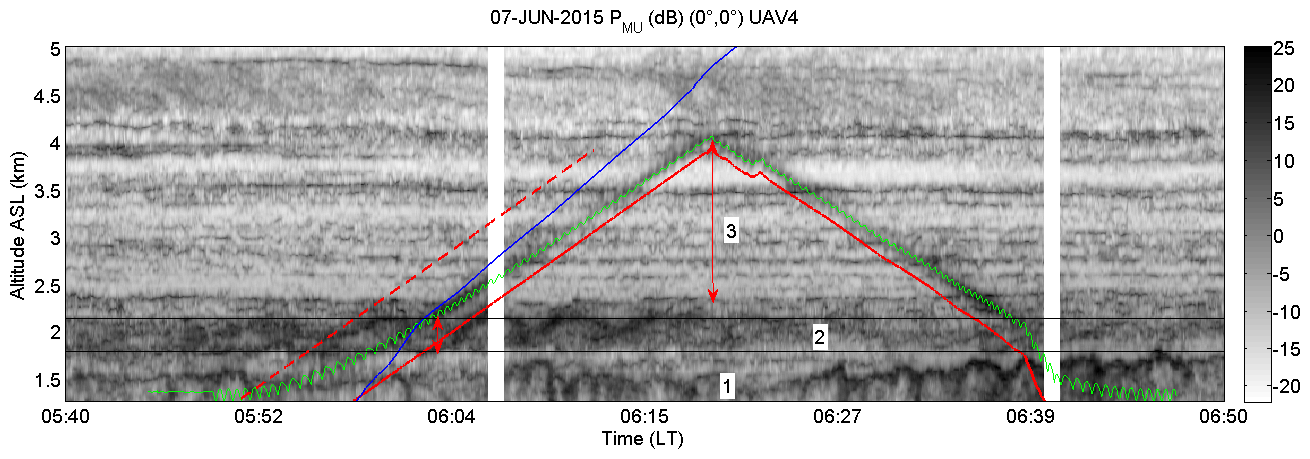
Time-height plot of MU radar echo power at vertical incidence and high range resolution from 05:40 LT to 06:50 LT on 7 June 2015. The red (green) line shows the altitude (distance) of UAV vs. time. The blue line shows the altitude of a balloon vs. time. The label 1 refers to cloud region, 2 to the KH region and 3 to the stratified region, respectively.
The ShUREX (Shigaraki UAV Radar Experiment) 2015 campaign carried out at the Shigaraki Middle and Upper atmosphere (MU) observatory (Japan) in June 2015 provided a unique opportunity to compare vertical profiles of atmospheric parameters estimated from unmanned aerial vehicle (UAV), balloon, and radar data in the lower troposphere. The present work is intended primarily as a demonstration of the potential offered by combination of these three instruments for studying the small-scale structure and dynamics in the lower troposphere. Here, we focus on data collected almost simultaneously by two instrumented UAVs and two meteorological balloons, near the MU radar operated continuously during the campaign. The UAVs flew along helical ascending and descending paths at a nearly constant horizontal distance from the radar (~ 1.0 km), while the balloons launched from the MU radar site drifted up to ~ 3–5 km in the altitude range of comparisons (~ 0.5 to 4.0 km) due to wind advection. Vertical profiles of squared Brünt-Väisälä frequency N2 and squared vertical gradient of generalized potential refractive index M2 were estimated at a vertical resolution of 20 m from pressure, temperature, and humidity data collected by UAVs and radiosondes. Profiles of M2 were also estimated from MU radar echo power at vertical incidence at a vertical sampling of 20 m and various time resolutions (1–4 min). The balloons and the MU radar provided vertical profiles of wind and wind shear S so that two independent estimates of the gradient Richardson number (Ri = N2/S2) could be obtained at a range resolution of 150 m. The two estimates of Ri profiles also showed remarkable agreement at all altitudes. We show that all three instruments detected the same prominent temperature and humidity gradients, down to decameter scales in stratified conditions. These gradients extended horizontally over a few kilometers at least and persisted for hours without significant changes, indicating that the turbulent diffusion was weak. Large discrepancies between N2and M2 profiles derived from the balloon, UAV, and radar data were found in a turbulent layer generated by a Kelvin-Helmholtz (KH) shear flow instability in the height range from 1.80 to 2.15 km. The cause of these discrepancies appears to depend on the stage of the KH billows.
