** Progress in Earth and Planetary Science is the official journal of the Japan Geoscience Union, published in collaboration with its 51 society members.
** Progress in Earth and Planetary Science is partly financially supported by a Grant-in-Aid for Publication of Scientific Research Results to enhance dissemination of information of scientific research.





Gallery View of PEPS Articles
Methodology
Human geosciences
201709201709
Acoustic water bottom investigation with a remotely operated watercraft survey system
Yamasaki S, Tabusa T, Iwasaki S, Hiramatsu M
Aquatic investigation, Echo sounding, Bathymetry, Fish finder, Remote operation, Unmanned watercraft
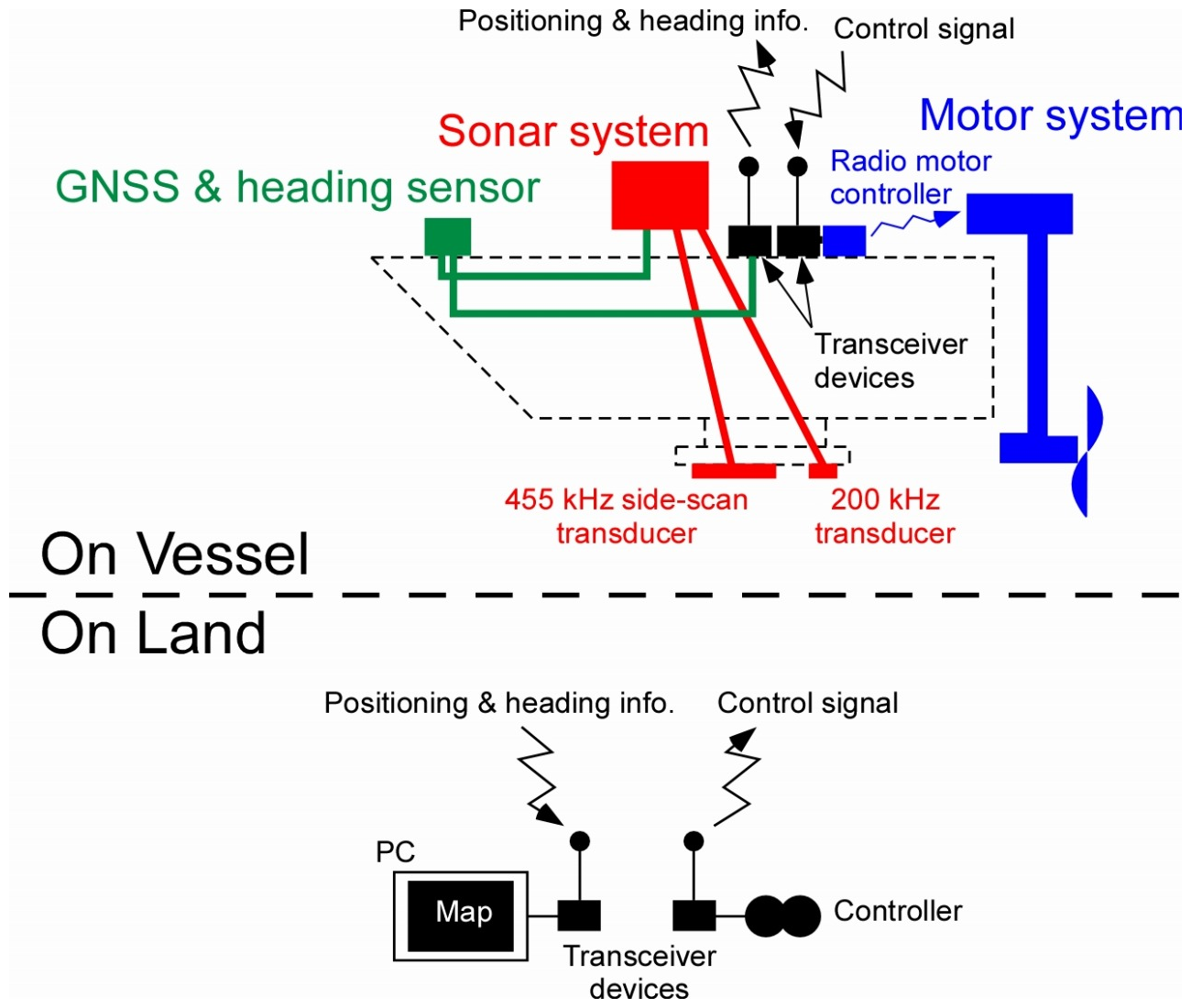
Fig. 1
The concepts behind the remote-controlled watercraft survey system. The watercraft has four systems: motor (blue), sonar (red), GNSS receiver and heading sensor (green), and transceiver (black).

Fig. 2
The bathymetric map (0.2 m interval in depth) and the results of acoustic bottom analyses obtained by using a 200 kHz acoustic source: (A) E1–roughness value, (B) E2–hardness value, and (C) Peak SV–hardness value. The results are shown with colored solid circles 6 m in diameter (the area of scanning at a depth of 30 m, the average depth in this area). (based on the ninth Japanese rectangular coordinate system; the top is north and the original point is 36°00’00”N, 139°50’00”E).
This paper describes a remotely operated investigation system developed by combining a modern leisure-use fish finder and an unmanned watercraft to survey water bottom topography and other data related to bottom materials. Current leisure-use fish finders have strong depth sounding capabilities and can provide precise sonar images and bathymetric information. Because these sonar instruments are lightweight and small, they can be used on unmanned small watercraft. With the developed system, an operator can direct the heading of an unmanned watercraft and monitor a PC display showing real-time positioning information through the use of onboard equipment and long-distance communication devices. Here, we explain how the system was developed and demonstrate the use of the system in an area of submerged woods in a lake. The system is low cost, easy to use, and mobile. It should be useful in surveying areas that have heretofore been hard to investigate, including remote, small, and shallow lakes, for example, volcanic and glacial lakes.
